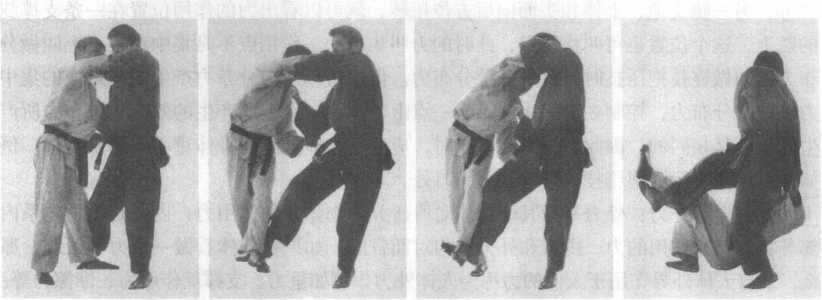
相互接触的两物体,在接触面上发生的阻碍相对动作或相对运动趋势的 相互作用力,称为摩擦力。物体所受摩擦力的方向总是与其运动或趋势的方向相反。摩 擦力一般分为静摩擦力与滑动摩擦力两种,柔道运动中最为常见的为静摩擦力。相互接 触的两物体有相对滑动趋势而又保持相对静止时,在接触面上产生阻止其出现相对滑动 的力。如.:当攻手拉受手要施技时,双方运动员的脚部均受到摩擦力的作用,攻手的前 后脚的受力如图3-6-1所示,前后脚所受的摩擦力均为静摩擦力,后脚的运动趋势向 后,所以摩擦力方向向前;前脚的运动趋势向前,所以摩擦力的方向向后。
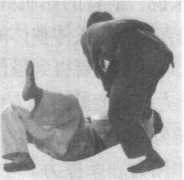

图3-6-1出足扫技术动作
3.画受力图应注意的问题
(1) 研究对象所受的重力。
(2) 与研究对象相接触的其他物体对它的作用力(支撑反作用力、摩擦力)。
(3) 只画外力不画内力,当研究对象为一人或更多人时,肌肉力为内力。当研究对 象为两人或两人以上时,人与人之间的作用力与反作用力均为内力。
(二)人体重心
地球上的物体无不受重力的作用,物体重心是指物体各部分重力的合力的作用点, 人体也不例外。人体全部肢体(环节)所受重力的合力的作用点就叫人体重心或人体总 重心。由此可知,人体重心不像物体那样恒定在一个点上。
1.人体模型
在运动生物力学研究中,为了突出主要矛盾,需把人体(研究对象)进行简化处 理,看成力学模型。常用的力学模型有质点、刚体和多刚体系统。多刚体系统是指由许 多刚体(环节)组成的链状系统,这就是人体模型。
(1 )人体模型中的假设(条件):
- 每个环节都有固定的质量,而且它只集中在环节重心上; 行
- 运动时,环节重心在该环节的位置不变;
- 各环节之间的连接(关节)是皎链联接的点;
- 运动时,环节绕其重心的转动惯量不变。
(2)柔道项目中常采用的人体模型 Ny
①日本(松井秀治)模型:把人体分为头、颈、躯干、上 nr 臂、前臂、手、大腿、小腿和足等15个环节(图3-6-2 )
测得的人体各环节相对重量(环节占体重的百分比)与环节相对 oo
重心半径系数(环节重心至该环节近侧端距离与该环节长度的比
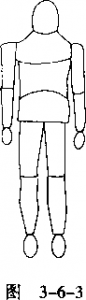
②苏联(扎齐奥尔斯基)模型:原苏联扎齐奥尔斯 基与谢鲁扬诺夫应用放射性同位素扫描的方法,在运动 员活体上测定人体重心,取得了重要研究成果。该模型 将人体分为头、躯干上部、躯干中部、躯干下部、上臂、 前臂、手、大腿、小腿和足等16个环节(图3-6-3 )□ 通过对100名运动员的测试研究,得到身体各环节相对 重量与环节重心半径系数(表3-6-3 )
o另外,还根据运 动员身高、体重建立了计算各环节绝对重量的各项回归 方程等。
 .人体重心的位置与运动规律
.人体重心的位置与运动规律人体重心的位置
当人体姿势不变时,人体重心并非特指身体上某一固定点。它的位置是一个随机变 量,随着呼吸、消化、血液循环等生理过程的进行在一定范围内移动,其变化范围一般 在1.5~2厘米。据测定,正常站立时,人体重心一般在身体正中面上第三戢椎上缘前方 7厘米处。由于性别、年龄、体型不同,人体重心位置略有不同,一般男子重心位置的 相对高度比女子高。自然站立时,男子重心高度大约是身高的56%,女子大约是身高的 55%,主要是因为环节的重量分布不一样造成的。
(2) 支撑状态下身体重心的运动规律
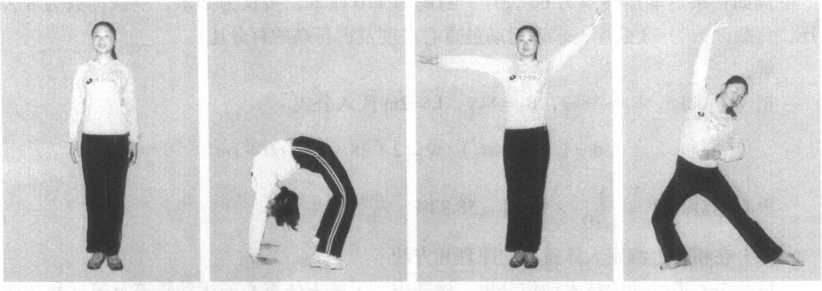
在体育运动中的支撑状态下(人体与外界相接触),由于身体姿势的变化,重心位 置也随之变化。例如:手臂上举,重心升高;体后伸,重心后移;下蹲,重心下降;向 左体侧屈,重心左移;做大幅度的体前屈或体操“桥”动作时,人体重心可以移出体外 (图3-6-4 )
0重心移动的方向总是与环节移动方向一致,并且重心移动的幅度取决于环 节移动的幅度,环节运动的幅度大,重心移动的幅度也大,并且其环节质量愈大,则重 心移动幅度愈大。因此,人体在完成维持静立姿势的过程中,当人体重心发生偏移,有 失去平衡的倾向时,人体能借助于补偿动作(身体姿势的变化)在一定范围内“中和” 或“抵消”重心的不适宜移动。

图 3-6-4
3.人体重心的测量方法目前运动生物力学测量人体重心方法有两种,第一种是用重心板实测静态人体的重 心位置,第二种是从摄影和录像获得的人体图像中通过测量和计算获得。下面着重介绍 实测人体重心的方法。
(1)人体一维重心板测定原理与方法
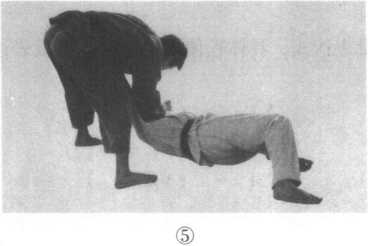
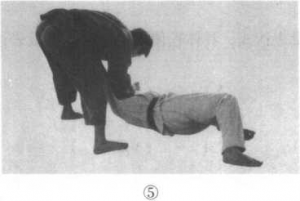
一维重心板测定原理:设备是由一块长板(床板)和体重秤组成,如图3-6-5所 示。其力学原理是根据静力学中的力矩平衡方程进行重心位置的测定。我们已知运动员 的体重(W)、板的长度(L = AB)、空载时秤的读数(RQ与负载时秤的读数(R2),设 运动员的重心高度为d,现以脚跟处的A点求矩:

£M(b)= O
板子的力矩=L・Ri
人体的力矩= W・d
两者的合力矩= L-R
2L-R, + W-d-L-R
2 = O
d = L (R
2-Ri)/W
例如:某运动员体重为60公斤,身高为170厘米,板长为2米,空载读数为8公 斤,负载读数为38公斤,求该运动员重心高度及占身高的百分比。
解:
把 W = 60kg, R
2 = 38kg, R| = 8kg, L = 2m 代入公式
d = L ( R
2 - R,) /W = 2 ( 38 - 8 ) /60 = Im
重心相对高度=g疽x 100% = 58.82%
(2)在相片上测定人体重心的原理和方法
目前在柔道运动的技术动作分析与诊断中,了解人体重心的运动轨迹及速度和加速 度的变化规律是非常重要的。在实际应用中,对大量的影片或录像画面中的人体重心位 置的计算都在影片解析仪上进行。为了深入了解解析仪计算人体重心的基本原理和方 法,这里以一张相片上的人体动作中部分环节合重心的计算方法来说明图片法求重心的 原理和步骤。
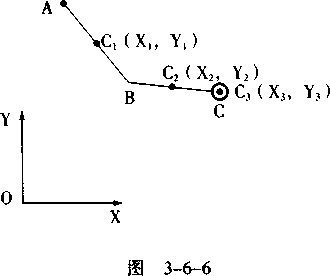
图片法求重心的原理是根据力学中的合力矩定理进行计算的,在人体模型介绍中, 我们知道根据动作的特点,首先选取人体模型,然后确立图片中各关节点的位置,联接 各关节点,使图像成为直线联接图。下面通过计算上肢环节合重心说明求重心的原理与 方法。如图3-6-6所示,已知运动员的体重W,所采用的人体模型为日本模型。在0 点建立坐标系。首先确定上臂与前臂的重心位置。上臂与前臂的长度为AB与BC,分 别与对应的重心半径系数(Ri与Rz)相乘,确定上臂与前臂的重心(G与C2),手的重
心直接确定(C3),然后根据环节相对重量与 运动员体重确定上臂、前臂和手的重量R、P
2 和P
3O根据建立的坐标系确定各环节重心点 的坐标 c, (X,, Y,), C
2 ( X
2, 丫2), C
3 ( X
3, 丫3)。合重心C (Xc, Y
c)的计算公式为:
P'X| + P2・X2+P3・X3
P| + P
2 + Pj
V _
P.-Y. + P2-Y2+P3-Y3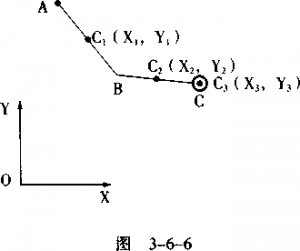
道运动中的平衡及稳定性特征
1
.平衡(1)平衡的力学条件
柔道运动中的技术动作是保持与破坏平衡动作的各种组合。当攻手施技时,要破坏 受手的平衡,而受手要保持平衡动作,防止平衡被破坏。因此,受手必须采用相应的技 术,具备了一定的力学条件,才能出现静止和平衡。这就是说,人体具备产生平衡的力 学条件后,其运动才能被限制,出现平衡状态。
为了使人体保持静止和平衡必须具备两个条件:
- 作用于人体的一切外力相互平衡,也就是通过人体重心的各力的合力应等于零, £F = 0。
- 作用于人体重心的各外力矩的总和也等于零,£M(°)=0。
在人体静力性动作中,能满足上述条件的重要因素是肌肉内力,它的大小取决于身 体各部分和整个身体相对于支点的位置。整个人体的平衡,主要是主动力(重力、拉 力、推力等)与约束反力(支撑反作用力
)之间的平衡。
人体的局部平衡,主要是肌拉力矩与重力矩和阻力矩之间的平衡,即肌肉拉力X力 臂=环节重力X重力臂+阻力X阻力臂,如两臂前平举时手臂的平衡就是以上述理论 为依据的(此时阻力矩为零)。
(2 )平衡的分类
- 平衡物体受到外力作用偏离其平衡位置时,根据保持平衡的可能性来分类,可 分为:
甲、随遇平衡。其特点是重心始终保持在一个水平面上,既不升高,也不降低。柔 道练习中这类平衡极少见,只有团身前、后滚翻可以认为近似随遇平衡。
乙、稳定平衡。其特征是平衡物体位置改变时,它的重心上升,从而产生使物体恢 复原来平衡状态的重力矩(恢复力矩)。
丙、不稳定平衡。其特征是平衡物体位置改变时,它的重心下降,从而产生引起物 体失去平衡而继续倾斜的重力矩(倾斜力矩)。
丁、有限度的稳定平衡。物体位置的偏离在一定的边界(范围)内,仍能回到原来 的位置。其特征是:下支撑物体的偏离不超过一定限度时,即重力作用线未超出支撑面 积边界时,其重心随偏离程度而高,势能不断地增大,从而重力形成稳定力矩。
甲、上支撑平衡。支点在重心上方的平衡,如各种悬垂动作。上支撑平衡都属于稳 定平衡。
乙、下支撑平衡。支点在重心下方的平衡,是不稳定平衡,如站立。但是在所有下 支撑的柔道平衡动作,身体倾斜只是在一定范围内,重心矩能使身体恢复到原来位置 上,这种下支撑平衡属于有限度的平衡。柔道项目中的平衡主要是下支撑平衡。
丙、混合支撑平衡。既非完全上支撑,又非完全下支撑。
2.下支撑平衡动作稳定性的判定柔道运动员在下支撑时如果倾斜度较小,他的总重心投影点不超出支撑的界限,且 重心升高,则重力矩能使他恢复原来位置;当身体继续倾斜,重力作用线超出支撑面边 界时,平衡也就破坏了。
柔道动作的下支撑平衡动作都是有限度稳定平衡,这种有限度稳定平衡的能力,叫 做稳度。影响稳度的因素有:
(1) 支撑面:在下支撑物体的平衡中,都有一定的支撑面,支撑面积愈大,总的来讲 物体平衡的稳定性也愈大。支撑面积是由各支撑部位的表面和它们之间所围的面积组成。
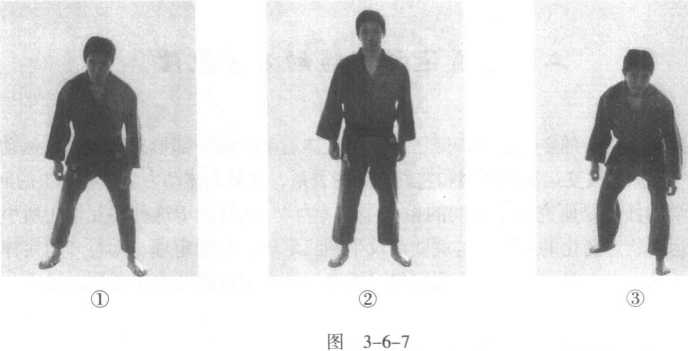
(2) 重心的高低:重心高低对稳定性也有影响,一般讲,重心愈低,稳定性就愈大 (图 3-6-7 )o
(3) 稳定角:它是指重心垂直投影线(或称重力作用线)与重心至支持面边缘相应 占的连线间的夹角。稳定角愈大,物体的稳度愈大。稳定角综合地反映了支撑面积大 小、重心高低及重心垂直投影线在支撑面内的相对位置这三个因素对稳定性的影响。
(4) 平衡角:平衡角等于某方位平面(左右或前后)上稳定角的总和。它可以说明 物体在某方位上总的稳定程度。
稳定系数:运动员的稳定性还可以用稳定系数来表示,稳定系数(K)为稳定力 矩〔以新〕与翻倒力矩〔M.翻)〕之比。当K>1时,人体能抵抗外来的翻倒力矩,平衡不 被破坏;当K<1时,人体抵抗不住外来的翻倒力矩,平衡遭到破坏,人体就会翻倒。
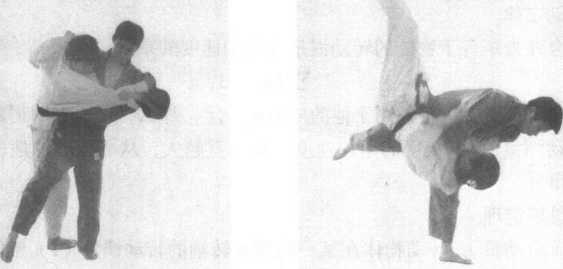
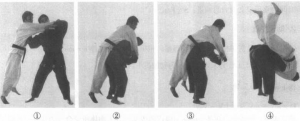
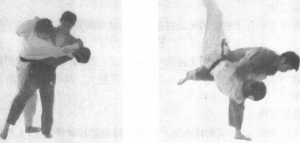
在背负投(图3-6-8 )动作中,要求攻手重心低,贴近受手小腹部,上手把位要 高,这样就形成了较大的翻倒力矩。实际上,重心低、贴得紧与上手把位高是形成较大 翻倒力矩的力臂的两种途径,从而使受手的翻倒力矩大于其稳定力矩,稳定系数<1, 平衡被破坏
。
柔道运勒中的舫力法原理
人体运动是复杂的空间运动,除了应说明身体运动时的外部形态特征外(运动学), 还必须进一步探讨改变运动的原因和它们之间的关系,这是人体动力学所要解决的问题。
动力学的任务是研究物体之间的相互作用(力),以及由于这种相互作用所引起的 物体机械运动状态变化的原因。这就要涉及牛顿三定理、动量定理、动量守恒定律、转 动定律和动量矩定理等问题。下面我们仅对柔道运动中常用的几个定理加以讨论。
(-)动量定理在柔道运动中的应用
应用动量定理时,是将研究对象看做力学模型中的质点。
- 动■与冲■
(1 )动量:我们用一个物体的质量(m )和速度(v )的乘积来量度这个物体的 “运动量”称之为“动量”(K),用数学公式来表示,即是K = mv。动量是矢量,其方 向与速度方向一致,单位为公斤•米/秒(kg-m/s)
o(2)力的冲量:一个物体的动量要发生改变,不仅与作用力(F)的大小和方向有 关,而且与力作用时间(t)的长短也有关,在力学中将作用于物体上的外力与外力的 作用时间的乘积定义为力的冲量:S = F・t。
- 动It定理
动量与冲量是密切相关的两个物理量,根据牛顿第二定律F = ma,
将3 = Iirlo, (V,为末速度。V。为初速度)代入上式
t
Ft = mV, - mV
0 = m (V
t-V
o)
此式表明:物体动量在某一时间间隔内的改变,等于物体所受合外力在同一时间间 隔内的冲量。
上式动量定理是矢量表达式,具体在使用时,可将矢量表达式向坐标轴投影,得到 动量定理的坐标分量式:
2Fxt = m ( Vxt — Vxo)
SF
Yt = m (V
Yt-V
Y0)
2Fzt = m (Vzt-Va.)
- 动■定理的应用
凡是物体受力,其运动状态改变的情况,都可应用动量定理(注意,力学模型为质 点)。
柔道运勒中的舫力法原理
人体运动是复杂的空间运动,除了应说明身体运动时的外部形态特征外(运动学), 还必须进一步探讨改变运动的原因和它们之间的关系,这是人体动力学所要解决的问题。
动力学的任务是研究物体之间的相互作用(力),以及由于这种相互作用所引起的 物体机械运动状态变化的原因。这就要涉及牛顿三定理、动量定理、动量守恒定律、转 动定律和动量矩定理等问题。下面我们仅对柔道运动中常用的几个定理加以讨论。
(-)动量定理在柔道运动中的应用
应用动量定理时,是将研究对象看做力学模型中的质点。
- 动■与冲■
(1 )动量:我们用一个物体的质量(m )和速度(v )的乘积来量度这个物体的 “运动量”称之为“动量”(K),用数学公式来表示,即是K = mv。动量是矢量,其方 向与速度方向一致,单位为公斤•米/秒(kg-m/s)
o(2)力的冲量:一个物体的动量要发生改变,不仅与作用力(F)的大小和方向有 关,而且与力作用时间(t)的长短也有关,在力学中将作用于物体上的外力与外力的 作用时间的乘积定义为力的冲量:S = F・t。
- 动It定理
动量与冲量是密切相关的两个物理量,根据牛顿第二定律F = ma,
将3 = Iirlo, (V,为末速度。V。为初速度)代入上式
Ft = mV, - mV
0 = m (V
t-V
o)
此式表明:物体动量在某一时间间隔内的改变,等于物体所受合外力在同一时间间 隔内的冲量。
上式动量定理是矢量表达式,具体在使用时,可将矢量表达式向坐标轴投影,得到 动量定理的坐标分量式:
2Fxt = m ( Vxt — Vxo)
SF
Yt = m (V
Yt-V
Y0)
2Fzt = m (Vzt-Va.)
- 动■定理的应用
凡是物体受力,其运动状态改变的情况,都可应用动量定理(注意,力学模型为质 点)。分析动作时,涉及到力和速度的关系,因此,在分析柔道动作时动量定理被广为 应用。
(1) 用增大作用力和时间来增大人体速度:蹬伸、推撑等动作,在柔道运动中称为 冲击性动作。为了增大人体的速度,即增加动量(因为人体的质量是固定的,当动量增 大时,速度就增大),我们就应尽量增加冲量,即增加作用于地面或人体的力和时间。 在发挥出最大力量的情况下,延长力的作用时间,能增大冲量,以达到增加动量的目 的。如背负投动作时,为了使动作获得较大的速度,就需增加动量,我们就采用增加冲 量的办法,加大下肢蹬伸力量和时间,以便顺利地完成动作。这里应注意,在实践中, 延长作用时间并不是有意识放慢动作速度,因为根据肌肉的力学特点,放慢速度会降低 肌肉力量,因此,正确的做法是,在保证发挥肌肉最大用力的时间,通过增大动作幅度 来增加作用时间。
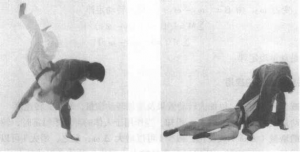
(2) 延长力的作用时间以减小冲力:在柔道受身动作中,要求运动员身体依次着 地。如侧翻受身动作,要求身体着地的顺序为:右手-右前臂-右上臂-右肩背一 左背腰-*左臂-左腿(当左腿着地时)-左臂掌拍地(图3-6-9 )
o其原理为:当作 用于人体的冲量为一定时(Ft =常量),作用时间(t)延长的话,则冲击力(F)就会 减少。
(3)在科学研究中,根据动量定理公式F-t = m (V,-V
o),我们常根据冲量求速度, 或已知速度求冲量,或已知速度、时间求作用力,或已知作用力、速度求作用时间等。 这些都是研究分析动作中,进行定量计算的推算方法。下面简单介绍一下柔道动作分析 中常用的测力系统的组成及测力曲线。
测力台可分为一维、二维及三维。其中一维为直线,表示一个方位,如前、后或 上、下;二维为平面,表示两个方位,如前、后与上、下或前、后与左、右;三维为立 体,表示三个方位,即前、后,左、右与上、下。测力系统由测力台、信号放大器与记 录仪三部分组成。记录仪通过计算机控制,将测试情况通过屏幕或打印机显示或记录, 可测得支撑反作用力的大小,所得的曲线为力——时间(F—t)曲线。下面通过垂直方
向的Ft曲线,说明它所反映的情况。
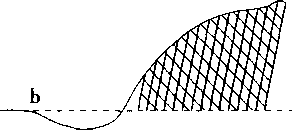
图3-6-10表示某运动员做蹬伸起跳动作时垂直方向的F-t曲线变化。F为支撑反 力,t为时间,由F与t之间所围成的面积,为支撑反力的冲量。a为运动员的体重,b 为运动员下蹲,c为下蹲到最低点,cd为蹬伸阶段,d为离开地面。
根据动量定理,cd这部分阴影的面积愈大愈好,这样运动员所获得向上的速度就 愈大。
道运动中的旋转运动
研究人体转动的规律性,是将人体(研究对象)作为力学模型中的刚体来研究的。 柔道运动中各种动力性动作的转动,可分为支撑状态的转动动作和腾空状态(无支撑) 的转动动作两种。在柔道运动中主要是支撑状态的转动动作。
1.转动瞄平动的物体具有惯性,其惯性的大小用物体的质量来量度,质量大惯性大,质量小 惯性小。那么,转动物体同样也具有惯性。在力学上用“转动惯量”来描述物体转动惯 性的大小。因此,转动惯量是描述物体转动时保持原来转动状态能力的物理量。转动惯 量越大,转动状态越不容易改变。一般物体可视为质点的集合,其转动惯量就等于各质 点对转轴转动惯量的总和。
I =Zm)r12其中I为转动惯量,m为质点的质量,「为质点至转轴的距离。
人体可看做由许多点组成的,当人体姿势改变时,其转动惯量也会改变。影响人 体转动惯量的因素有体重的大小、转轴的位置和身体的姿态。如被摔的运动员直体与 团身时的转轴虽然都是人体的横轴,但由于两者姿态不同,直体与团身时的身体质量 分布不同,直体的质量分布比团身的距转轴的位置远,所以直体的转动惯量比团体的 大。
- 转动定律和动■矩定理
(1)转动定律
物体的合外力矩等于物体的转动惯量和角加速度的乘积,即
ZM = I- P
如受手在受技时,假定作用于他的外力矩一定,那么,他团身团得越紧,离攻手越 近(减小转动惯量),所获得的角加速度(P )就越大,从而获得的速度也就越大,越 容易让对方得分。
(2 )动量矩定理
动量矩(角动量):转动物体在某一时刻对转轴的转动惯量(I)与角速度(3 )的 乘积,即动量矩= 13。
冲量矩(角冲量):为外力矩(M)与它作用时间(t)的乘积,即冲量矩= Mt。
动量矩定理:如果转动惯量为I的物体在外力矩(M)作用下,经过t时间,转动 角速度5变为32,由p=(32- w.) t,代入转动定律
XM = !• p = (
0>2 - w |) /t
£M・t = I (
(i>2 - w |)
这就是动量矩定理。
- 动■矩定理的应用
(1) 减少转动惯量,以加大转动效果及增加转动惯量,制止旋转速度
根据动量矩定理
£M・t = IA<o得知,当作用于人体的冲量矩恒定时,转动惯量(I) 与角速度
的增量(A3)
成反比,减少I可以增大A<o;反之,增大I可以减小A 3 , 因为人体质量m是恒定的,所以转动惯量的大小取决于肢体各组成环节绕其质心的转 动惯量距转轴的距离,离轴越远,转动半径越长,转动惯量就越大,反之就小。攻手在 完成某些摔的动作(受手
是翻转动作)时,往往在前半部伸长身体,即增大外力矩来提 高对受手的作用效果,而后半部则尽量缩短半径,减少转动惯量(与受手一起),以加 快旋转角速度,以完满地完成动作,获得较高的得分。
(2) 偏心力矩的形成
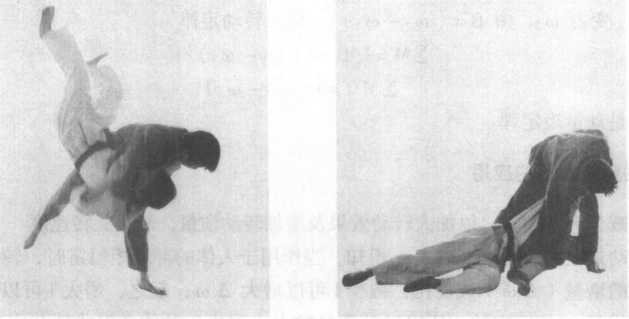
一个物体受到偏心力(力的作用线不通过物体的重心)的作用,这个物体离开支撑 点后,可产生既平动又转动的复合运动。根据这一原理,柔道练习中的一些进攻(翻 转)动作必须在施技醵时给受手形成偏心力矩,如图3-6-11所示的受手侧方翻转,则 必须使刈力向后下方(FD,并在受手重心的下方通过,以便产生作用线至转轴的距离 (r),使偏心力矩M = F,-r
0这样,就使运动员完成大刈动作。
偏心力矩的大小取决于施技时的冲量矩的大小,即用力时间(t)与力矩的大小。 根据动量矩定理= 得知,冲量矩的大小等于动量矩的增量,由此产生的动量 矩,也就是运动员绕某轴唳的动量矩。
由于柔道施技动作方向有后、前、侧之分,因此,向后翻转的动作其支撑反作用力 应通过受手身体重心的后下方,向前翻转的动作应通过其重心的前下方面向侧翻转的动
图
3-6-11作应能过其重心的异侧下方。
(3 )利用动量矩的转移加大转动动作的效果
人体运动中,身体的各个环节的转动情况都不一样,并且每个环节对同一转轴的动 量矩也是不一样的,各环节除了绕身体基本轴转动以外,又同时绕关节轴转动。在有支 撑状态下,局部肢体或整体可能都受外力矩的作用,其动量矩是随冲量矩的增减而增减 的,但是在某一瞬时人体可以通过一些动作,将某些环节的动量矩转到全身,或将全身 的动量矩转到某一环节,或从某些环节转移到另一些环节。柔道练习中,运动员往往根 据自身动作的需要,把动量矩转移到最需要的部位,进行合理的重新分配,以达到预期 的效果。
动量矩的传递,首先是该环节快速转动,然后运动员突然主动用力急停制动,使该 环节的动量矩迅速转移到邻近的环节,像车老板甩鞭子一样。诸环节间动量矩有目的地 转移传递,乃是完成柔道练习中带有支撑转动动作的基本技术原理。
小结:通过对本讲的学习,使学员掌握柔道运动中常用的运动生物力学基础原理,能够对 一般的技术动作进行受力分析,判断动作稳定性的大小;运用动量定理和动量矩定理分 析技术动作;了解在柔道动作分析中常用的重心测量方法。
作业题:
- 人体重心在柔道运动中的重要性和运动规律。
- 举例说明提高人体翻转能力的力学途径。
思考题:
- 如何分析柔道运动员在做动作时的受力情况?画受力图应注意什么?
- 影响人体稳定性的因素有哪些?结合技术动作说明。
- 动量定理在柔道训练中有哪些作用?
- 结合技术动作说明影响转动惯量大小的因素有哪些?
主要参考文献:
- 陆昕、刘保成.柔道.西安体育学院教务处,1986
- 全国体育学院教材委员会.体育学院通用教材运动生物力学.北京:人民体育出 版社,1990
- 刘志诚、李诚诚译.人体运动生物力学.北京:人民体育出版社,1990
- 石玉琴、古福明.运动生物力学研究方法与实验.成都:西南财经大学出版社, 1994
(作者:周里 摄影:房施龙 演示:马伟左云 张小利 赵峰)
教学目的:通过本讲内容的教学,使学员了解柔道运动训练过程的结构与控制方法,能对训练 过程进行调控,使高水平运动员能在重大的柔道运动比赛中处于最佳竞技状态。
教学安排:总时数10学时。其中讲授8学时,考试2学时。
竞技体育运动是现代社会人类有目的的一种自主运动,其目的的实现是控制的结 果。而人的有目的的活动是在人的神经系统的控制下实现的。与自主运动(如体育运 动)相反的是自然发生的运动(如江、河、海中水的运动),这是一种没有控制的运动。 现代柔道运动训练是一个为了不断提高运动员体能和技、战术水平及心理素质水平,取 得优异运动成绩而进行的涉及人、物、环境与管理等多个方面因素及其相互作用的复杂 的活动过程,它是一个系统工程。在柔道运动系统的活动过程中,教练员、运动员与管 理人员为了实现运动训练目标而进行着信息的交流,进而控制着运动训练活动的进程与 方向。所以,系统论、信息论和控制论,即“三论”的思想和理论观点对开展柔道运动 训练有着重要的指导意义。从“三论”的思想观点看,现代柔道运动训练是一个系统, 它不是孤立的,是众多竞技体育运动现象中的一种,不但同其外部的体育运动现象和社 会现象有着纵横双向联系(即形成柔道运动训练的宏观系统),而且本身内部要素之间 也发生着相互影响作用的关系(即形成柔道运动训练的微观系统),它的宏观系统和微 观系统是有机联系的、统一的。同时,从“三论”的思想观点看,柔道运动训练是多要 素、多层次、多功能的一个综合的整体结构。它与运动训练活动中无所不在的信息源所 发出的信息发生着交流与沟通。因此,它又是动态的、随机变化的,因而有信息的交流 与沟通。柔道运动训练又是一个可控制的信息过程,它体现于运动员个体的自我控制、 教练员与运动员和管理人员之间的信息传递与反馈,这样,就可使柔道运动训练活动的 效果达到最佳。
(一)柔道运动训练系统
根据系统论的理论与方法,即系统思维方法或系统方法,认为在任何社会性活动 中,都应把所研究或处理、观察的对象视为系统来认识和实践。所以,我们按照系统论 的观点来考察柔道运动训练过程可以看到,现代柔道运动训练是一个较为复杂的人类自 主运动和活动的过程,它不仅是指教练员和运动员在运动场上的各种教、练的活动,而 且还包括运动员选材、运动竞赛、生活管理、运动员心理和思想教育等活动,以及运动 员训练后的恢复和营养等一切与提高和保持运动成绩有关的全过程。这就是说,现代柔 道运动训练不仅包括影响运动员运动成绩的内部因素(运动员本身的身体条件和训练水 平等),而且还包括其外部因素(训练组织与管理等)。因此,现代柔道运动训练是一个 极其复杂的系统和实践活动过程,它包含着许许多多的局部子系统,这些局部子系统相 互紧密联系在一起,共同实现训练目的。
柔道运动训练系统是因一定的训练目的或目标,由一定的要素,构成一定的组织形 式,实现一定的训练功能的整体。它是实现柔道训练目的的各种因素及其关系的总和,也 是柔道运动训练活动存在的形式,同时,柔道训练系统是柔道运动训练理论认识的对象。
- 柔道运动训练系统的特点
- 对象性。柔道训练系统作为教练员、运动员、体育科技人员和管理人员等研 究、处理和观察的对象,它是一个对象系统。
- 社会性。柔道训练系统是社会大系统和体育大系统中的子系统,它本身也是受 某些社会性因素的影响和制约的,具有社会系统的性质。
- 开放性。柔道训练系统是一个开放系统,与各种外界因素相联系,为各种外界 因素所制约。
- 动态性。柔道训练系统不是固定不变的,而是随着训练时间的变化而变化,是 一个动态系统。
- 复杂性。柔道训练系统包含各种子系统,它既包含物质系统又包含价值观念系 统,既包含社会系统又包含自然系统,因而应把柔道训练系统作为一个大系统来认识。
- 柔道运动训练系统的要素
要素是系统中主要的元素,是系统的主要组成部分。要素以其特有的功能保证系统 功能的实现。柔道训练系统的要素是柔道训练系统的基本组成部分,这就是教练员、运 动员、运动竞赛和训练条件等。这四个要素共存于柔道训练系统中,它们是相互依存、 相互作用、缺一不可的。其中,教练员、运动员两个要素是训练系统活动的发起者、执 行者和承担者,是实现训练系统功能的主体;运动竞赛及其目标对训练活动起着导向作 用;训练条件包括训练的物质条件和时间等,是柔道运动训练得以进行的基本保证。由 此,教练员和运动员在一定的训练条件下,围绕某次运动竞赛及其目标而进行专项化的 运动训练活动。
浏览1,192次