|

|
纠正方法:右脚主动下压,在重心后落地缓冲。首先,可以 提高势能向动能的转化率,增加水平动能。其次,使支撑反作用 力水平分力提高,也利于增加水平动能。
1. 第二个旋风脚旋转角度不够。
纠正方法:一方面,通过提高腾空高度来增加旋转角度。旋 转角度不够是因为高度不够,还没有旋转到位就已经落地。可通 过提高水平速度,调整踏地角度,提高肢体配合来完成。另一方
面,提高腾空前旋转动量矩的储备。通过助跑时左膝关节的迅速 左前旋和踏地时左腿的积极左上摆来储存旋转动量矩,保证腾空 后有足够的旋转动量矩储备来完成身体旋转。
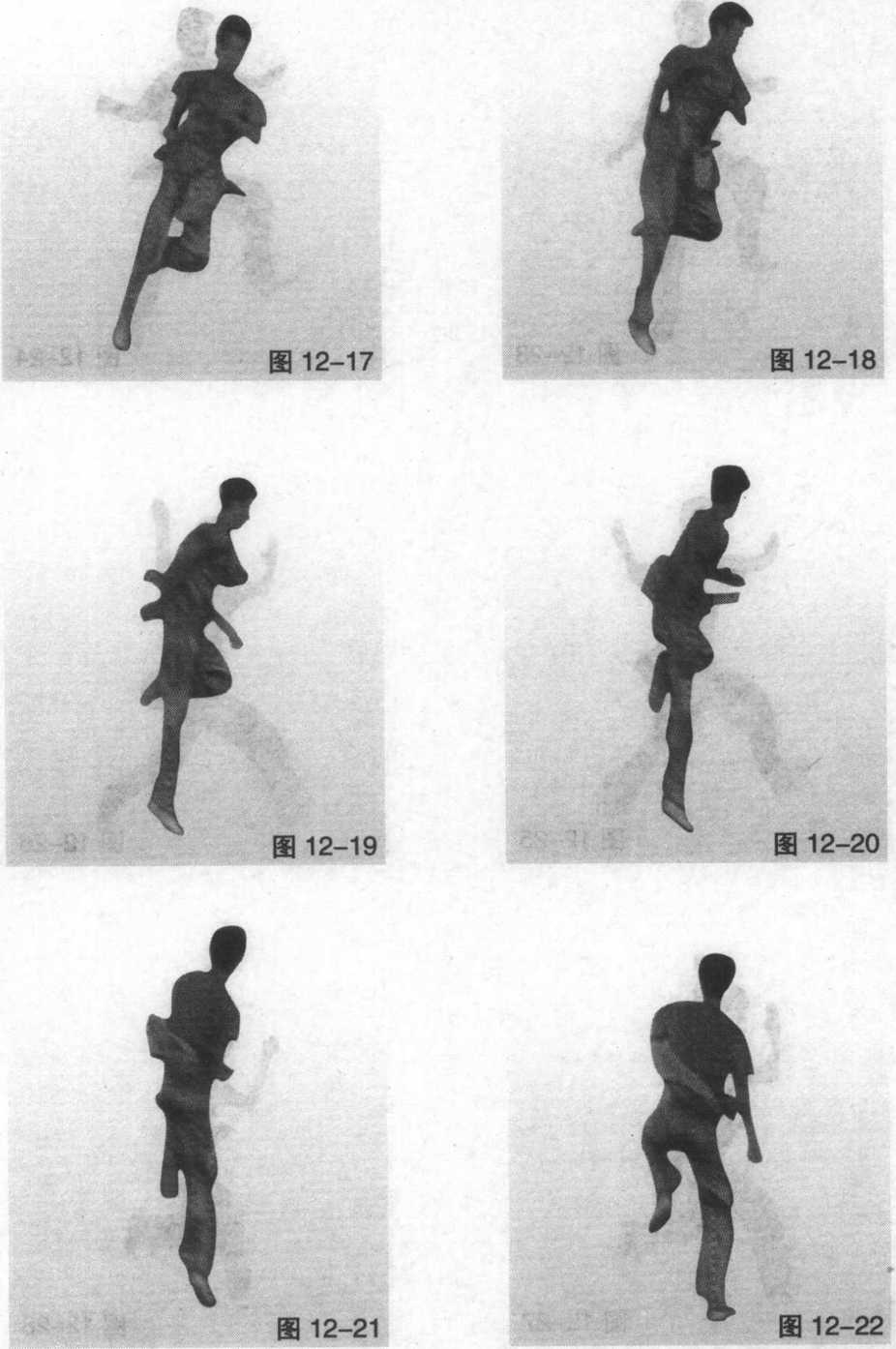
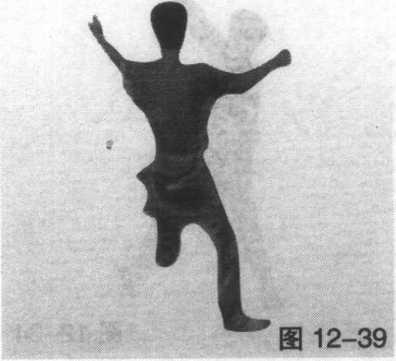
【旋风脚连接技术连续图谱】(图12-13至图12-44)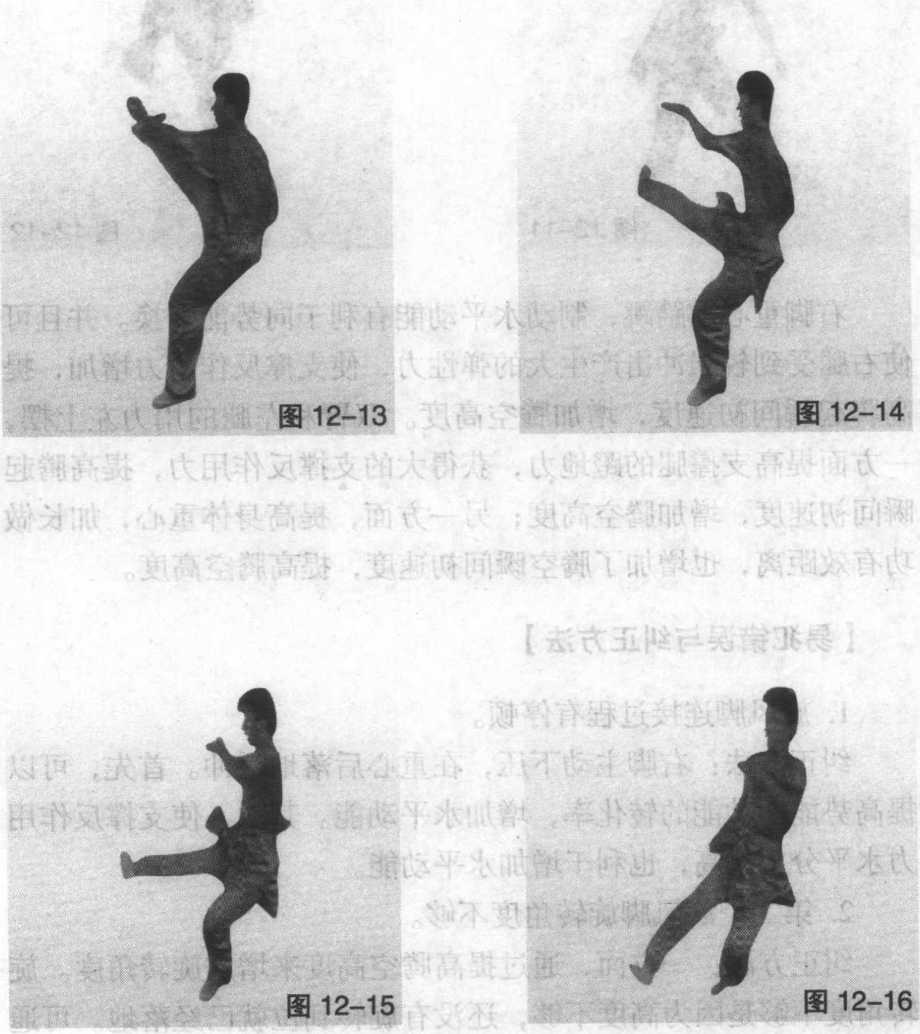
QD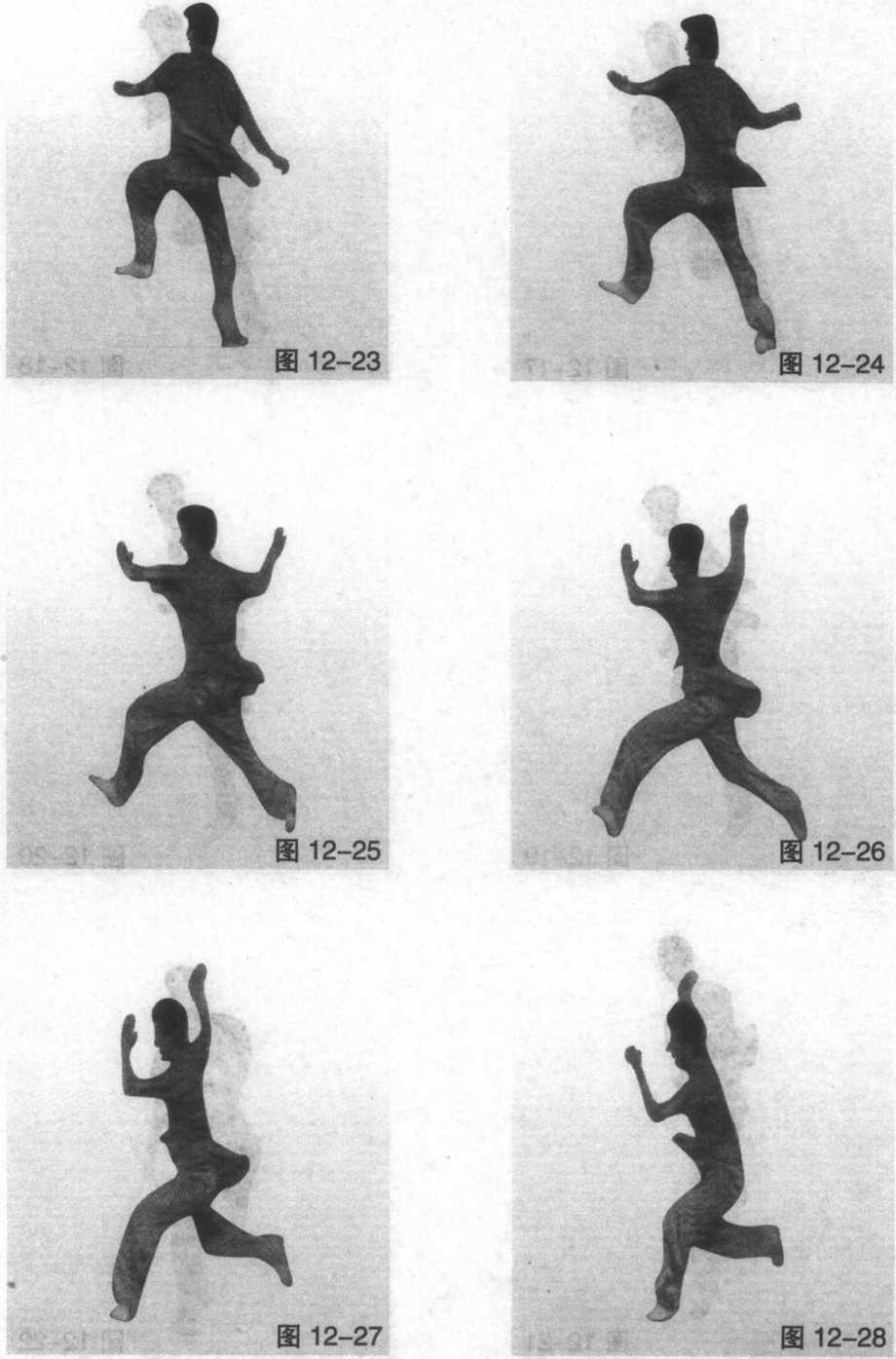
(^9T)(^9T)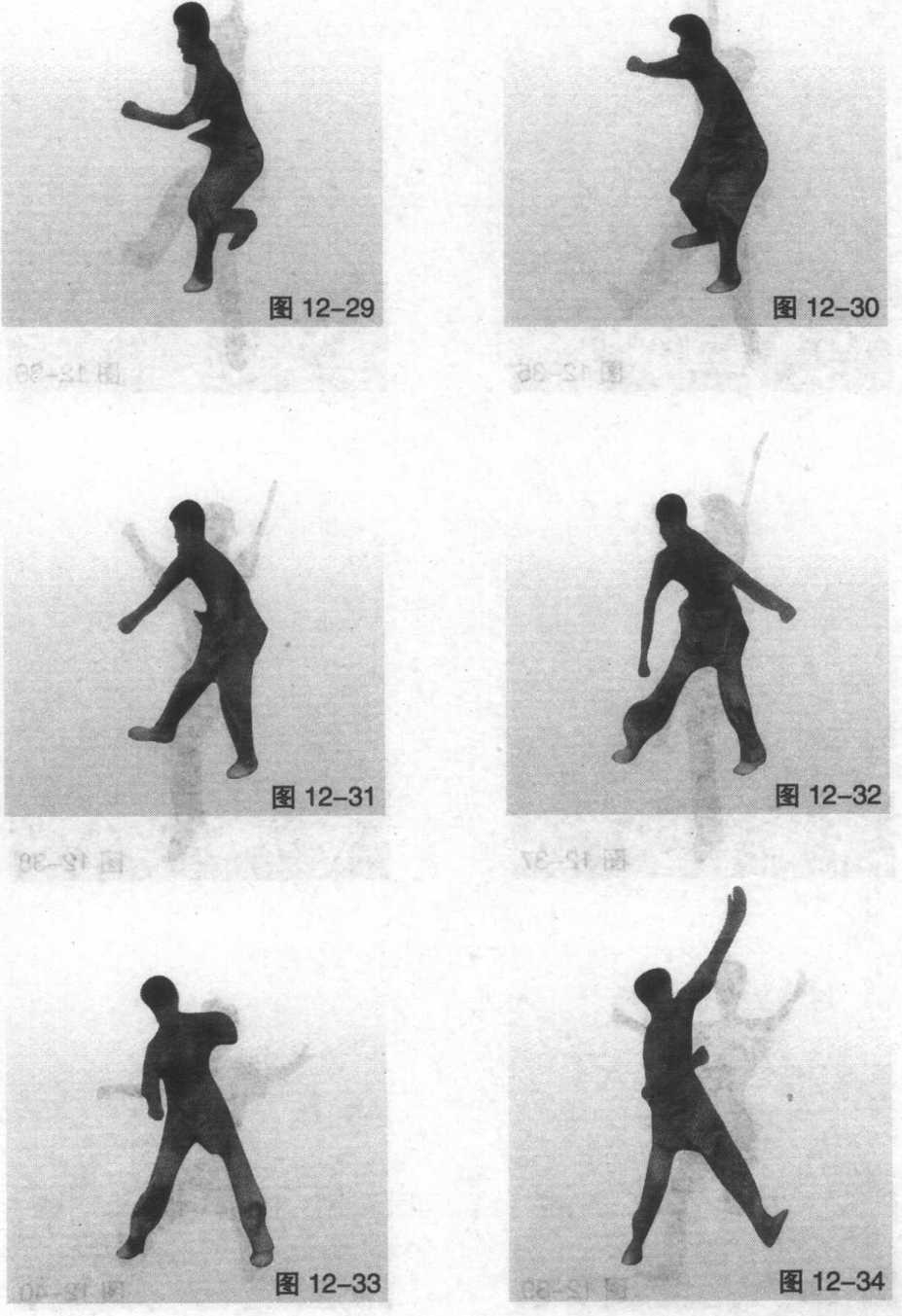
(^9T)
(^9T)
CM)CM)
CM)
CM)
G〇DG〇D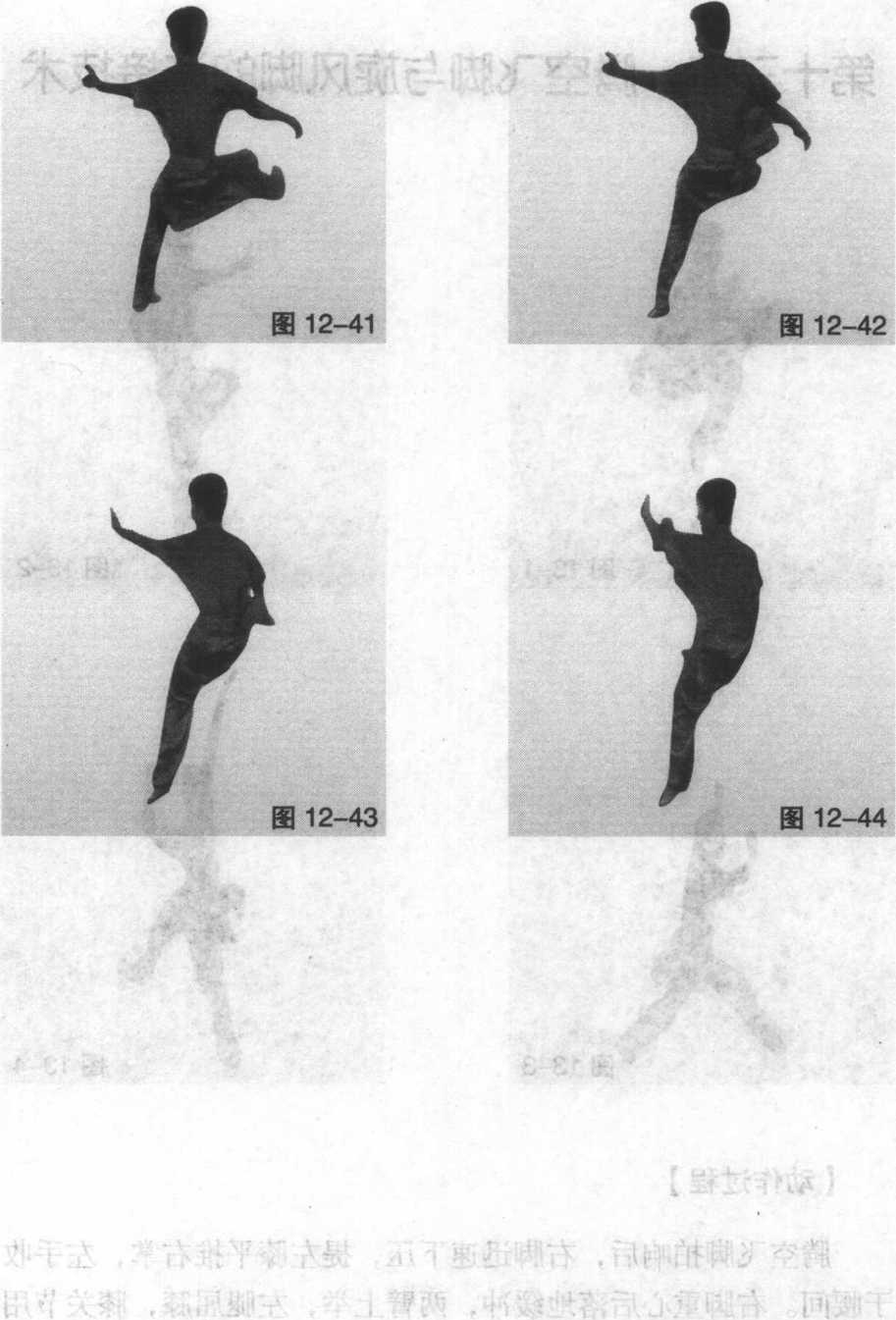
G〇D
G〇D
浏览721次