|

|
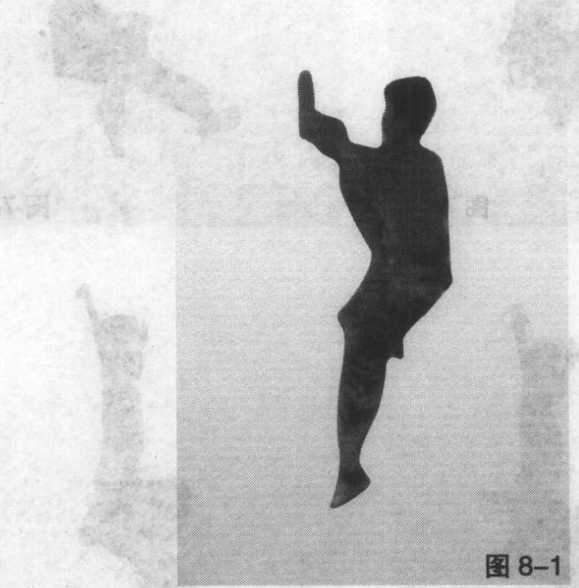
【动作过程】
左腿膝关节外摆左前上步,左脚尖外撇着地,左手向前向 上,右手向后向上向前摆动。扣脚尖上右脚重心前踏地,两臂以 肩为轴迅速下摆。左腿屈膝左上快速摆动,同时两臂直臂迅速左 上抡摆,右腿蹬地跳起,身体旋转一周,右腿贴近身体做里合 腿,左手脸前主动合击右脚掌,右脚主动下压落地缓冲。
【动作细节与论证】
1. 稍降重心,右脚微扣,在体侧主动踏地,瞬间离地(图 8-2 至图 8-3 )
(1) 能充分利用上步助跑产生的动能,尽可能地避免能量的 损失。助跑的水平能量动能,只有通过右脚的合理制动,才能最 大限度地转化成势能,增加腾起高度。如果右脚制动不好,水平 方向上动能大,造成身体侧倾,水平动能转成势能效果差,腾起 高度受影响。
(2) 最大限度地发挥肌肉爆发力以及肌腱等组织的弹性力。 一方面,降重心使腿部肌肉和肌腱被被动拉长,收缩前的被动拉 长,不仅会使肌肉收缩做功距离加长,而且更重要的是拉长的肌 肉在收缩过程中表现出更大的瞬时肌力值,提高肌肉输出功率, 提高爆发力,使蹬伸更加有力,能增加蹬地力和蹬伸速度。体侧 的踏地制动使弹性组织储存能量,储存的这部分能量将增加蹬地 力。
(3) 尽可能地缩短蹬地时间。根据动量守恒原理,作用时间 加长,作用力将减小,其反作用力的垂直分力也相应减少,因 此,缩短蹬地时间有利于提高腾空高度。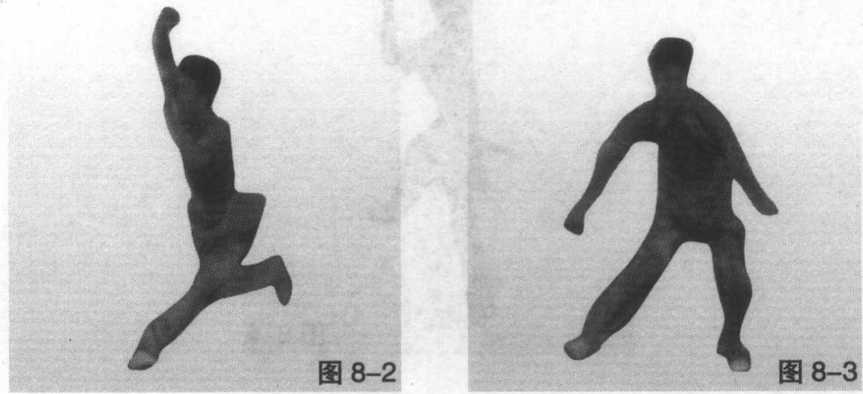
2. 加速左上摆臂,快速左上提左膝(图8-4)
(1) 可增加蹬地力。加速上摆臂提左膝,产生一个向上的动 量,根据动量守恒原理,会有一个和其相同的动量与之相平衡,
这一动量方向向下,因此可以增加蹬地力,人体受到的支撑反作 用力增大利于提高腾空高度。还可这样理解,摆动腿和两臂快速 上摆,产生的向下的摆动反作用力是惯性力,它和蹬地力一起作 用于支点,增大了反作用力,能提高腾空高度。
(2) 使身体重心在腾空前达到最高。人体的重心随肢体位置 的变化而改变,肢体位置升高重心升高,反之重心降低,双臂尽 力上摆,高提左膝,使身体重心升高。
(3) 储存了动量矩为后面动作的完成提供了条件。两臂和左 腿的上摆,储存了向上的动量矩,同时左腿的左上提,将产生一 个围绕支撑点旋转的动量矩,这个动量矩可使旋风脚腾空后继续 旋转。双臂和左腿的制动,可以把动量矩转移到躯干和右腿,使 躯干腾起更加容易,右腿更易摆动。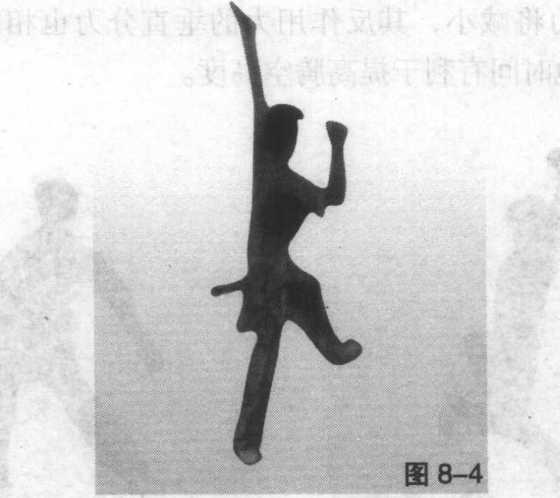
3. 额前上主动拍脚(图8-5至图8-6 )
(1)增加旋转速度。根据转动惯量定理,半径越小转动越容 易,半径越大转动越难,右脚额前拍脚,使腿贴近躯干,旋转半 径小,易于转动。
(2)左手的主动拍脚,可增加右脚的摆速,提高右腿摆动速 度。根据动量矩守恒原理,左手的主动拍脚产生一个动量矩,必 然有一个与之平衡的动量矩产生,这一动量矩将加速右腿的摆 动,提高其摆速。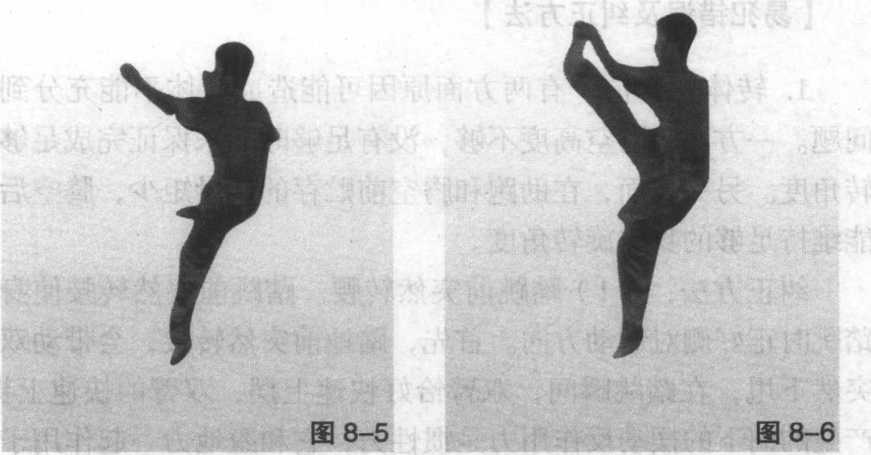
浏览608次